





Integrity is often considered a uniquely human value: a person is said to have integrity if they talk and act the same way in private as they do in public. But it’s a value that’s also applied in systems design, to indicate the degree to which the system’s output can be trusted.
In positioning systems, integrity has two dimensions. Firstly, a system has to be aware of when its ability to calculate an accurate position has become unacceptably unreliable, and secondly, it has to be able to alert an operator that it has crossed that threshold and is no longer to be trusted.
Integrity is a key metric for designers of automated driver assistance systems (ADAS) and autonomous vehicles. When the vehicle, rather than the driver, is responsible for knowing exactly where it is, its ability to recognise (and flag) when it has become compromised is a key safety issue.
GNSS positioning integrity has been solved in aviation
This is a new challenge for ADAS and AV engineers, but it has already been solved in other industries where positioning systems are safety-critical. The most celebrated example is aviation, which uses multiple layers of integrity monitoring and alerting to minimise the risk of avionics systems making navigation decisions based on unreliable positioning data.
As part of the effort to develop high-integrity navigation systems for aviation, the WAAS laboratory at Stanford University produced a diagram that neatly visualises system performance and the integrity margin available. . This ‘Stanford diagram’ is now used the world over and is a very useful tool for ADAS designers.
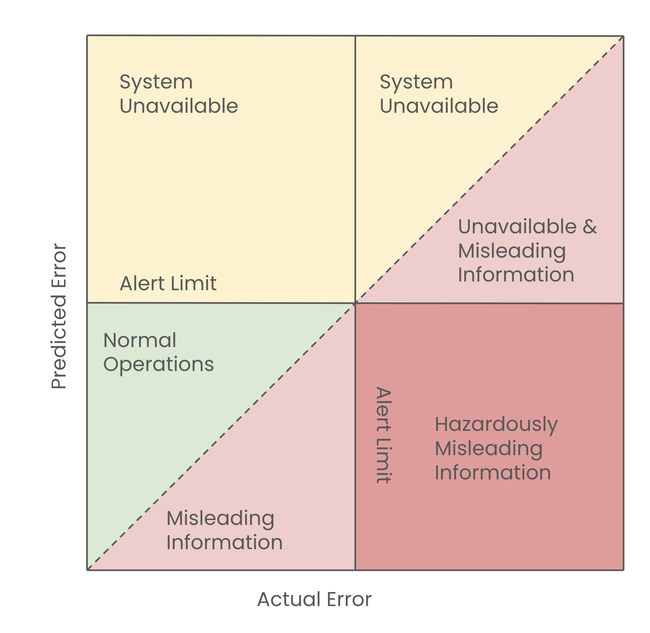
Measuring system integrity with a Stanford diagram
The Stanford diagram plots the difference between two variables: the GNSS measurement error predicted by the receiver (y axis) and the actual error in the signal as measured by the receiver after the fact (x axis).
When these two variables consistently fall within a specified range—defined as ‘Normal Operations’ on the diagram—the receiver can consider its position estimates to be reliable. If they start to diverge, it’s an early warning that its estimates are becoming unreliable. If they start to diverge beyond an acceptable threshold (the ‘Alert Limit’), it means the estimated position risks being hazardously misleading and the receiver should raise an alert.
If there aren’t enough satellites in line of sight (LOS) to provide actual error measurements—the top section of the diagram—the system can’t compare predicted with actual error and so can’t gauge the reliability of its position estimates. For safety reasons, the system is required to declare itself ‘unavailable’ and hand over to a human operator or alternative positioning sensors.
The ADAS challenge: Maintaining position integrity in built-up areas
The diagram highlights the challenges facing designers of hands-free ADAS and AV systems. When the vehicle is on the open road, there’s little environmental disruption to satellite signals, so a good receiver should be able to predict the measurement error to a tolerable degree of accuracy. This is why high integrity has been relatively easy to achieve in aviation: positioning systems are either used in clear skies or in airports that are literally ringfenced against radio frequency (RF) interference.
But maintaining integrity is exponentially harder for urban hands-free driving. Built-up areas also have a narrower view of the sky, which means fewer LOS signals and lots of multipath reflections as signals bounce off buildings. Without a reliable mechanism to distinguish multipath from LOS signals, receiver integrity can quickly be lost with no warning. Cities are also noisy environments from an RF point of view, drowning out satellite signals and reducing the number of satellites available. This complex signal environment means modelling the measurement and therefore position error is much more difficult in urban areas than for aeroplanes in the sky.
S-GNSS Auto: bringing high integrity to GNSS receivers for ADAS systems
For ADAS engineers, one challenge is how to build integrity monitoring and alerting into hands-free driving systems. Another, equally important, is how to increase overall receiver integrity so that predicted and actual error stay within the ‘Normal Operations’ section of the Stanford diagram for longer periods.
This second challenge is one we’ve been focusing on with our Supercorrelation™ digital signal processing software. By estimating the vehicle’s trajectory and creating a synthetic aperture antenna along that trajectory, Supercorrelation can filter out RF noise and multipath reflections to focus only on line of sight signals—keeping predicted error and actual error within acceptable tolerances.
And because Supercorrelation runs as software in the receiver or on the GNSS chipset, it’s an affordable way for automotive OEMs and Tier 1s to significantly boost GNSS receiver integrity—both for today’s ADAS systems and for tomorrow’s fully-autonomous vehicles.
If you’d like to learn more about S-GNSS Auto and Supercorrelation, visit auto.focalpointpositioning.com or get in touch.
Share this post

Ramya Sriram leads marketing at FocalPoint, a UK-based company that provides GPS-enhancing software for automotive, wearables and smartphones.