- Products
- Solutions
- Ecosystem
- Resources
- About Back
About
About
About FocalPoint: our history, milestones and leadership team.
Our Purpose
Our purpose is to improve the lives of everyone who relies on positioning technology.
Careers
Learn about life at FPP, our impact, and what we offer. Hear from our people about our values and what they like about working here.
Sustainability
Read about our commitment to building a sustainable future.
Recognition






- Contact
What’s Next for Ubiquitous Lane Level Accuracy?
Ramya Sriram
5 min read
20th Jun, 2023
Automotive

The ADAS market is set to grow from its current market value of more than $30Bn to more than $100Bn, supporting critical safety and operational implications on the road.
Originally published in TU-Automotive – our GNSS industry expert Manuel Del Castillo shares this opinion piece on the future of ubiquitous lane level accuracy.
ADAS could potentially reduce accidents by as much as 90%. Designed to enhance human-machine interaction, ADAS enables functionality such as cruise control and requires constant monitoring of the external environment through sensors to aid and improve the safety of our roads. ADAS has facilitated a growth of innovative car technologies through audio and visual alerts alongside the use of GPS for lane level accuracy.
Problem with extending ADAS into cities
ADAS is much more difficult to implement in cities. By their very nature, cities are more chaotic than open highways and heavily impacted further by disorganized traffic and the unpredictability of pedestrians. If that wasn’t enough, the continual growth in both urban density and vertical growth means that GNSS (where other satellite constellations beyond GPS are used) is continually under challenge, caused by building reflections and other external interferences. In the past 10 years, the Council on Tall Buildings and Urban Habitat, (CTBUH) reports that the number of buildings over 300-meters has increased from 542 to 1,616 in the last 10 years alone, an increase of 198%.
Another integral part of the overall road safety solution is the accuracy of the required mapping for all roads, street layout and lane layout to centimeter level. These are called HD maps, and there are already a few suppliers of this information in the market. Along with HD Maps, these companies also scan and store 3D buildings data, used in the vehicle along with cameras and other sensors, in order to match where you are within the road network. It presents a complex 3D rendering map of the world. On the downside, it’s very expensive and presents a significant challenge for the autonomous and vehicle sector because it doesn’t scale very well. If a new building goes up, or there are other infrastructure changes, positioning accuracy could be compromised. Of course, capturing such mapping data and keeping it up to date is not only tedious, but costly in terms of resources required and updates frequency.
GNSS is critical to lane level accuracy positioning, because it is required for initialization and calibration of the ADAS systems, as well as providing an essential backup to the rest of ADAS sensors in the event of short failures caused by bad weather conditions. In the OpenSky, accurate lane level is already addressed using techniques known as GNSS RTK (real time kinematics) and GNSS PPP (precise point positioning). PPP works by removing systemic errors of GNSS, by receiving assistance data coming from reference receivers in an area of a few tens of kilometers. RTK also uses reference stations that are a few tens of meters away and works by successfully removing the systemic errors via real time corrections received over a data link and computing accurate distance to satellites by counting wavelengths of the GNSS carrier. While they provide a reliable service to safe autonomous driving and precision agriculture when used in open sky, these techniques have severe limitations where GNSS signals are obscured.
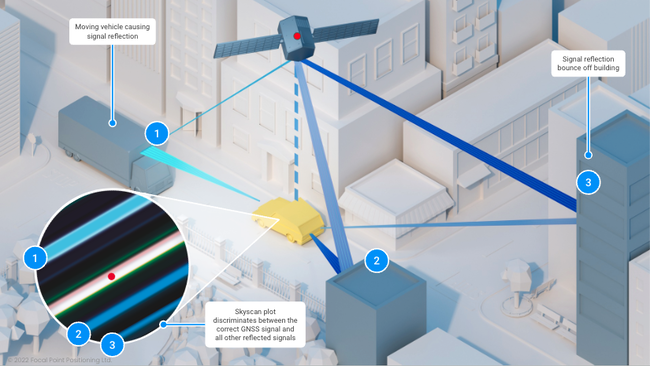
Multipath in action in an urban environment
More accuracy
Scaling ADAS into urban environments is dependent on GNSS accuracy. Essential in all environments, it localizes you on the road, offering the source of absolute location. The rest of the sensors provide relative location, and they are only useful when initialized and calibrated by a trustworthy absolute location. The inherent and most significant problem within GNSS in urban scenarios is multipath, which causes errors in location owing to the challenging building densities of cities. Causing errors in GNSS position calculation is, of course, particularly problematic for ADAS which is why ADAS are presently restricted to open roads.
An outstanding challenge in this space is the issue of tracking undesirable signals, typically from bounced multipath signals or even intentional spoofing cyber-attacks to the GPS signals. RTK and PPP are very useful for increasing the accuracy of tracked signals but are not able to verify their validity.
New software technologies based on smart tracking of line-of-sight GNSS signals can mitigate the weaknesses of GNSS receivers in cities and can become essential to complement RTK and PPP. A combination of these new software technologies tracking only the line-of-sight GNSS signals with the existing RTK/PPP correction services can provide the high reliability that is required for ADAS, successfully extending such advanced driver functionality into cities.
Share this post

Ramya Sriram leads marketing at FocalPoint, a UK-based company that provides GPS-enhancing software for automotive, wearables and smartphones.
Related post
Read blog
Unlocking antenna design flexibility for autonomous vehicles with S-GNSS®
In the race towards vehicle autonomy, automakers face a balancing act when it comes to GNSS antennas.