






For the continued evolution of hands-free driving, existing GPS technologies are no longer fit for purpose. If you’ve ever noticed your satnav playing up when you’re driving through woodland or in an urban environment with high rise buildings, you’ll know that the position it calculates doesn’t always match up with the vehicle’s real position.
This technical difficulty facing designers of advanced driver-assist systems (ADAS), is one of the engineering roadblocks to mass-market hands-free driving and the subject of last week’s webinar by Product Manager Jez Elllis-Gray and Business Development Lead, Chris Lane.
With greater demand for advanced navigation solutions and autonomous vehicles (AVs) , engineers must be able to deal with a number of challenges and restrictions of existing GPS technologies, including multipath, whilst also understanding its value in easing mass-market deployment of hands-free driving.
Understanding multipath
Whilst GNSS has remarkable capabilities, it does face certain limitations, with one of the most significant challenges being multipath interference. Multipath interference occurs when satellite signals reflect off buildings, trees, or other obstacles before reaching the receiver. These reflected signals can cause inaccuracies in positioning and timing measurements, degrading the overall performance of GNSS.
This can cause errors in the GNSS position calculation, which can be particularly problematic for autonomous vehicles, where accurate positioning is critical for safe and reliable operation. The receiver may calculate the position based on the wrong set of signals or be unable to determine which signals to use accurately.
Global Navigation Satellite Systems (GNSS) based positioning is the only globally available technology that can provide a high-precision source of position (GNSS includes the original GPS, GLONASS, Galileo, and BeiDou). Therefore the roadblock to hand-free driving is with overcoming multipath and the inherent restrictions with GPS in delivering high-level accuracy of location to enable safe, hands-free driving.
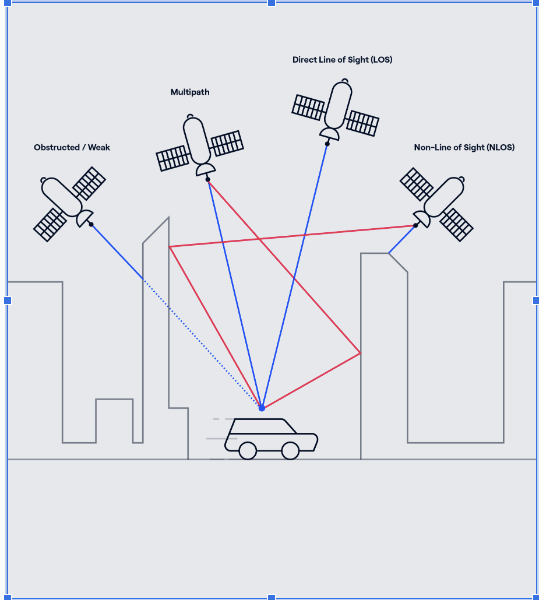
Multipath interference can lead to errors in determining the user’s position, especially in urban environments or areas with dense vegetation
Technical challenges to overcome
As the industry advances towards hands-free driving, designers, developers, and integrators of GNSS receivers for ADAS systems face numerous engineering challenges. Overcoming these obstacles is crucial to ensure the reliability and accuracy of GNSS positioning. Key challenges include:
Achieving accurate lane-level positioning in urban environments
Overcoming signal attenuation in suburban and other weak signal environments such as areas of high foliage
Compensating for poor GNSS performance due to high electromagnetic interference (EMI) inside the vehicle as well as design choices relating to antennae quality and placement
Overcoming the threat of RF cyber attacks to GNSS such as intentional spoofing and jamming
S-GNSS® Auto addresses all of the above scenarios and goes a long way to helping ADAS engineers design systems that are robust and reliable against the typical challenges facing today’s traditional GNSS receivers. As a software upgrade to an existing receiver, S-GNSS Auto works deep at the measurement level, correcting and compensating for errors and other factors(e.g. clock instability) that can ultimately lead to poor performance, and in turn, untrustworthy GNSS.
Share this post

Ramya Sriram leads marketing at FocalPoint, a UK-based company that provides GPS-enhancing software for automotive, wearables and smartphones.