






Some GNSS receivers struggle to maintain lane-level positioning accuracy due to reflected or attenuated signals. We look at how engineers can overcome the issue.
When Ford launched the Mustang Mach-E to the UK market earlier this year, it became the first OEM in Europe to offer truly hands-free driving—a huge milestone on the journey to vehicle autonomy.
But, as in the US, regulators have only approved the Mach-E for use on designated stretches of motorway, far from any urban centres. For hands-free driving to be safely extended into towns and cities, a series of technical hurdles must be overcome.
In a three-part blog series, we’ll explore three engineering challenges facing designers, developers and integrators of GNSS receivers for use in ADAS systems as the industry moves towards hands-free driving. The first of these is ensuring lane-level GNSS accuracy in woodland, built-up areas and other difficult environments.
The critical importance of GNSS accuracy in ADAS and AV systems
While GNSS is only one of a battery of sensors used to determine position in an ADAS system, it’s the only one that can provide an absolute rather than relative position. GNSS measurements therefore form a key input for real-time localisation, helping the ADAS to determine the vehicle’s exact position and trajectory.
In fully-autonomous driving, continuous accuracy of GNSS measurements becomes safety-critical, to ensure the positioning subsystem supports safe, timely and precise decision-making on the part of the wider vehicle control system. Lane-level accuracy at all times is a typical requirement, usually translating to a minimum of 1-2m, although different systems designers often have different specifications.
Once an absolute position is established via GNSS, relative positioning sensors like LiDAR, cameras, inertial measurement units (IMUs) and micro-electromechanical systems (MEMS) sensors can get on with the job of positioning the vehicle within the lane—often to an accuracy of 0.1m. These sensors enable the vehicle to detect and respond appropriately to obstacles and traffic infrastructure, and to make critical decisions around braking, indicating, turning, lane-changing and self-parking.
The varied roles of GNSS within an ADAS or AV system
As well as contributing directly to positioning calculations, GNSS frequently plays a number of other roles within a multi-sensor positioning system. Each of these secondary roles also required its location measurements to be accurate:
Initialisation: The global position provided by GNSS can be used to accelerate the vehicle control system’s initialisation process. While HD maps can provide a high-accuracy position, they can only do so efficiently if they know the vehicle’s starting location. Without that information, they would need to search the whole global database to find a match with what the camera and LiDAR are seeing—a time, data and compute-intensive process. The moreaccurate the initial GNSS-derived position, the faster the HD map localisation can initialise.
Calibration: An accurate GNSS position can be used to calibrate other sensors to maintain their own accuracy. In particular, inertial and MEMS sensors such as accelerometers, gyroscopes and wheel tick sensors typically accumulate biases over time that means their accuracy starts to drift. These sensors can be regularly re-calibrated by using the GNSS position to correct any biases that have crept in. The greater the accuracy of the GNSS position, the faster and more precise the re-calibration.
Cross-check: All sensors are susceptible to error, although the types of error differ between sensors. ADAS and AV systems compensate for individual sensor errors by using multiple types of positioning sensor and continually cross-checking them against each other. If the GNSS position disagrees with the HD map position as calculated using a camera, for example, it’s a sign that something is wrong. GNSS is ideally placed to perform the role of cross-checking and flagging any anomalous readings, as it is independent of other sensors and uses an entirely different data source—i.e. satellite signals from space.
Initialisation: The global position provided by GNSS can be used to accelerate the vehicle control system’s initialisation process. While HD maps can provide a high-accuracy position, they can only do so efficiently if they know the vehicle’s starting location. Without that information, they would need to search the whole global database to find a match with what the camera and LiDAR are seeing—a time, data and compute-intensive process. The moreaccurate the initial GNSS-derived position, the faster the HD map localisation can initialise.
Calibration: An accurate GNSS position can be used to calibrate other sensors to maintain their own accuracy. In particular, inertial and MEMS sensors such as accelerometers, gyroscopes and wheel tick sensors typically accumulate biases over time that means their accuracy starts to drift. These sensors can be regularly re-calibrated by using the GNSS position to correct any biases that have crept in. The greater the accuracy of the GNSS position, the faster and more precise the re-calibration.
Cross-check: All sensors are susceptible to error, although the types of error differ between sensors. ADAS and AV systems compensate for individual sensor errors by using multiple types of positioning sensor and continually cross-checking them against each other. If the GNSS position disagrees with the HD map position as calculated using a camera, for example, it’s a sign that something is wrong. GNSS is ideally placed to perform the role of cross-checking and flagging any anomalous readings, as it is independent of other sensors and uses an entirely different data source—i.e. satellite signals from space.
Signal modalities a modern GNSS receiver must be resilient to
GNSS accuracy killers: Multipath signal reflections and overhead foliage
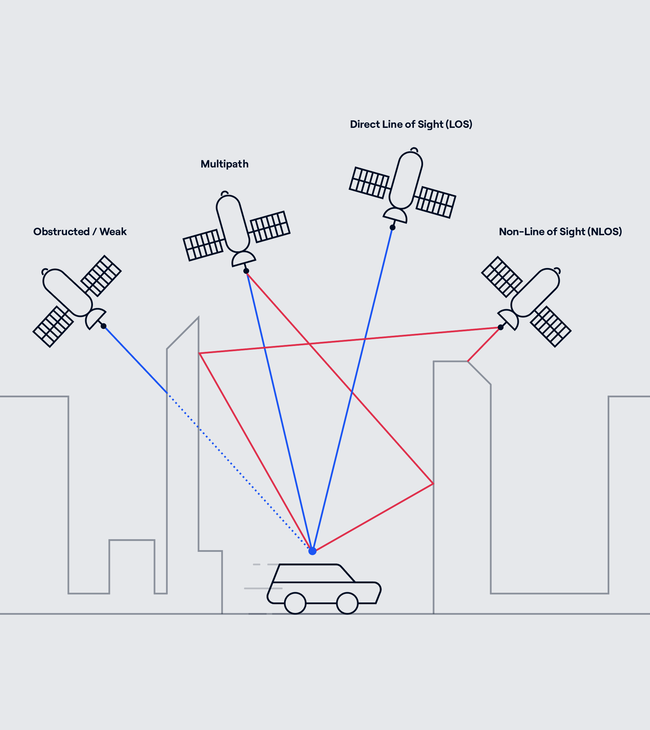
On the open road, there are few issues with GNSS accuracy. The receiver typically has a clear view of satellites in the sky, enabling the ADAS to compute and maintain a position with the lane-level accuracy required for Level 2 autonomy and higher.
But wooded and built-up areas cause accuracy issues that present GNSS engineers with technical challenges. In wooded areas, overhead foliage can attenuate already-weak GNSS signals, requiring higher-sensitivity receivers to maintain lock.
In urban environments, signals tend to bounce off buildings and other structures, creating reflections— known as multipath signals—that take slightly longer to reach the receiver. If the ADAS can’t carry out the technically extremely difficult task of distinguishing between these multipath signals and true line-of-sight signals, it can no longer compute an accurate GNSS position.
The problem can be somewhat mitigated with advanced GNSS signal processing algorithms and high-end physical antennas that can better exclude multipath signals and target line-of-sight signals. But these can be expensive solutions and the bulky antennas can be at odds with vehicle design. For OEMs to extend GNSS accuracy into urban environments for mass-market vehicles, an easier, lower-cost and more design-friendly approach is needed.
S-GNSS Auto: Extending GNSS positioning accuracy into difficult areas
This is exactly the challenge that we’ve been tackling at FocalPoint since 2015. Our S-GNSS Auto software, featuring our Supercorrelation™ technology, works at the chipset level within ADAS and AV positioning systems to achieve up to 10x greater GNSS positioning accuracy in wooded, urban and other difficult environments.
The pursuit of enhanced accuracy isn’t just a technical challenge; it’s a responsibility to create a future where self-driving vehicles navigate seamlessly, making roads safer and transportation more efficient. To learn more about how we’re helping to bring that future closer, subscribe to receive the latest news and insights.
Share this post

Ramya Sriram leads marketing at FocalPoint, a UK-based company that provides GPS-enhancing software for automotive, wearables and smartphones.
Related post
Why ‘confident but wrong’ GNSS is a risk to advancing vehicle autonomy
Traditional GNSS receivers can sometimes think they have a good, accurate position (low predicted error) when the actual error is high. This "confident but wrong" state can be very dangerous in urban autonomous driving.