






Autonomous driving is all about reliability: if you’re handing over control to your vehicle, you want complete confidence that it will keep you safe. In fact it must be even safer than human control for consumers to really adopt self-driving technologies. Luckily, automated driving promises exactly that, according to TRL.
In order to build systems that can deliver to these high expectations, systems must be built with multiple cross-checks and redundancies. Specifically for GNSS, the receiver needs to be able to identify the correct lane in roads and streets, in order to provide the necessary cross-check that will guarantee safe operation.
Manuel del Castillo, GNSS expert, demystifies this complex operations-based terminology in this blog associated with automotive manufacturers and helps to address just where we are in terms of defining and improving these safety standards for autonomous driving.
Sensor cross-checks
Advanced Driving Assistance Systems (ADAS) rely on a multitude of sensors – including cameras, radars, lidars, wheel sensors and GNSS. These are designed in a way that requires multiple cross-checks in the system to ensure the reliability and integrity of the system.
One of those cross-checks is particularly unique: the GNSS receiver is the only sensor able to provide absolute location – a latitude, longitude and altitude measurement, so you can position yourself on a map. Knowing exactly where you are is incredibly valuable information when it comes to controlling a vehicle.
For an ADAS system, the location accuracy requirement is lane-level. Why? Along with the perception sensors, GNSS should be able to confirm the vehicle’s position, to the correct lane to enable navigating multi-lane junctions, overtaking or turning off from highways.
However, achieving absolute location that reliably identifies the road can be quite challenging. As an example, an elevated crossroad, or a side road that runs parallel to a main road, would require the GNSS sensor to be able to locate you reliably with lane-level accuracy, so you ensure reliable road identification in these challenging situations. This is not an easy task for a traditional GNSS sensor. Navigation systems have used predictive road snapping (where the guidance assumes you’ve taken the suggested route and snaps you to it) in order to compensate for their lack of accuracy in tough environments, but we have all had times when you do not take the suggested turn off (either by accident or on purpose) and the route takes a while for it to correct. Obviously this is not a system that is reliable enough to deploy in an ADAS – we need to solve the lack of urban accuracy in a different way.
Safety standards impacting lane level accuracy
Road lanes are approximately 4m wide (as per figure 1 below, source fhwa). Therefore the accuracy requirement for GNSS is to locate you in the lane -ie with a maximum error of ±2m, so the position will always fall inside the lane. However, specifying the maximum error is not enough, we need to specify also the probability or the percentage of the cases in which the error will be between 1m and 2m, as there will always be some limitations and edge cases where accuracy degrades. Here is where every OEM may choose a different value for their specification, but a standard high probability is 95%, which equates to 2𝞂 (two standard deviations) in a normal distribution like the error distribution we are dealing with here.
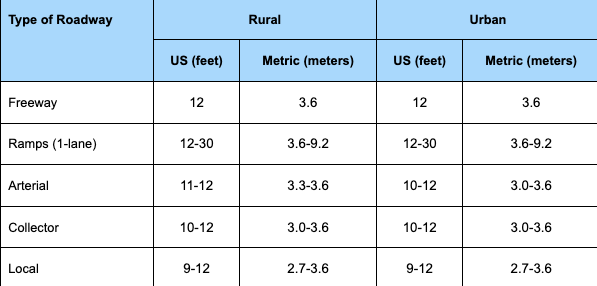
Table 1 – Ranges for US lane widths
In the real world, this means that an OEM could set a specification of 2m error (or less) for 95% of the time.
Safety critical localisation systems also require lane-level accuracy. Accident data recorders, intelligent speed assistance systems, lane level assist systems, vulnerable road users (VRUs) detection… all these future systems will require a maximum of 2m of error in any road or street.
The challenge of achieving 1m-2m accuracy in cities
Standard GNSS sensors can locate you to within 1m-2m error in open sky scenarios with support from correction services and fusion with car sensors like wheel odometry and IMUs; however they cannot achieve this in roads traversing a city, where you experience heavy multipath. S-GNSS Auto represents a cost-effective software upgrade to an existing GNSS receiver that can make lane-level accuracy possible in cities. This will enable ADAS systems to be extended onto more roads than ever before and gives OEMs the opportunity to increase the use of ADAS in mid-range vehicles due to its low cost and high scalability.
Manufacturers are beginning to demand a higher performance specification from GNSS receivers to enable both the safety and broad accessibility of autonomy. The answer lies in upgrading the way that GNSS receivers interpret satellite signals – a simple but revolutionary change enabled by our Supercorrelation technology in S-GNSS Auto.

An S-GNSS receiver – what does it mean to the automotive industry?
S-GNSS Auto is a software upgrade to a GNSS receiver, resolving the long-standing GNSS barriers, improving vehicle positioning reliability and accuracy, helping make road driving a safer experience. For a fuller understanding of S-GNSS Auto technology and how its breaking boundaries for hands-free driving see here.
To request a product introduction or for further insight into S-GNSS, please contact us.
Share this post

Ramya Sriram leads marketing at FocalPoint, a UK-based company that provides GPS-enhancing software for automotive, wearables and smartphones.
Related post
Why ‘confident but wrong’ GNSS is a risk to advancing vehicle autonomy
Traditional GNSS receivers can sometimes think they have a good, accurate position (low predicted error) when the actual error is high. This "confident but wrong" state can be very dangerous in urban autonomous driving.