






This article provides an introductory guide to GNSS positioning, covering how it works, the factors impacting location and timing accuracy and techniques used to improve accuracy. It also outlines GNSS applications and future trends.
What is GNSS and why is it important?
Global Navigation Satellite System (GNSS) is a term that refers to the multiple systems of satellites that transmit information about where they are and at what time, enabling millions of GNSS receivers to calculate their own positions. GNSS is important as it provides PNT (Positioning, Navigation and Timing) capabilities widely and freely anywhere in the world as long a clear view of the sky is available. GNSS enables accurate positioning used in applications such as smartphones, wearables, surveying, and precision agriculture, to name just a few.
Without accurate, accessible, and consistent location data, many critical operations would not be possible, and even small discrepancies or disruptions of these services have a great impact on our daily lives.
What are GNSS satellite ‘constellations’?
A GNSS constellation consists of a number of satellites (between 4 and 31!) to provide their intended coverage. More satellites are often added as a backup for reliability reasons. These satellites fly in a fixed orbit around Earth at 20,000 – 36,000 km altitude. It takes about 12 hours for a single satellite to complete a full revolution.
“GNSS” is a general term that includes multiple systems generally operated by a single country or group of countries. There are currently four major global operating GNSS systems: GPS (Global Positioning System), which is operated by the US. GLONASS is operated by Russia, Galileo by the EU, and BeiDou by China. Local GNSS systems providing only regional coverage include QZSS (Japan, with 4 satellites in orbit) and IRNSS/NavIC (India, with 8 satellites in orbit).
GPS was the first operational satellite navigation system, and has become the de facto term for GNSS. The first satellite was launched in 1978, and its use was intended for military purposes. After being opened up partly to civilian and commercial use, GPS became a 24-satellite constellation offering full global coverage in 1993. Today, the GPS GNSS system has 31 satellites in orbit.
How does GNSS work?
GNSS operates by transmitting signals from satellites to receivers on the ground. Each satellite continuously sends a time-stamped signal, which indicates when it was sent. The receiver captures these signals and calculates the time of flight by comparing the transmission time with its local time. By knowing the speed of light, the receiver can convert the time of flight into a distance measurement, allowing it to determine its distance relative to the satellites.
Multiple satellites are needed to calculate precise three-dimensional positioning, including latitude, longitude, and altitude. The receiver uses the distances from at least four satellites to resolve its exact location.
In order to maintain the satellites’ performance, a network of control stations on Earth use the location and timing data from the satellites to compare the received signal with their known location based on their orbit model. If necessary, a satellite’s orbit can be altered by an operator working in a control station if it turns out that a satellite has drifted from its orbit.
What are GNSS ‘bands’?
GNSS satellites transmit signals using specific frequency bands (see diagram below), which contain the range of frequencies between 1 and 2 GHz. For GPS these are known as the L1, L2, and L5 bands. The frequencies of the L-band transmit over long distances with minimal distortions which benefits positioning on Earth. L1 (centred around 1575.42 MHz) was first introduced with GPS in 1978 and is the most widely used band, offering civilian signals like the Coarse Acquisition (C/A) code. L2 (centred at 1227.60 MHz) was also introduced in 1978, initially for encrypted military signals (P(Y) code), but later in 2005, the L2C signal was added for civilian use to improve accuracy via dual-frequency positioning. The relatively new L5 (centred at 1176.45 MHz) began transmission in 2010, providing a highly reliable and robust signal for safety-critical applications such as aviation, thanks to its higher power and resistance to interference. Together, these bands enhance GNSS accuracy, reliability, and integrity.
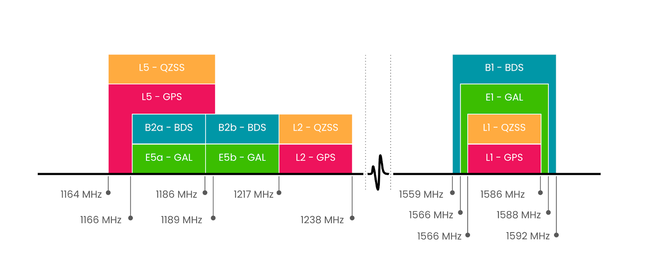
GNSS frequency bands
What factors impact GNSS positioning accuracy?
Even with four satellites to calculate the location of a static GNSS receiver, multiple factors impact location and timing data accuracy. Here’s an overview of the main factors affecting GNSS accuracy:
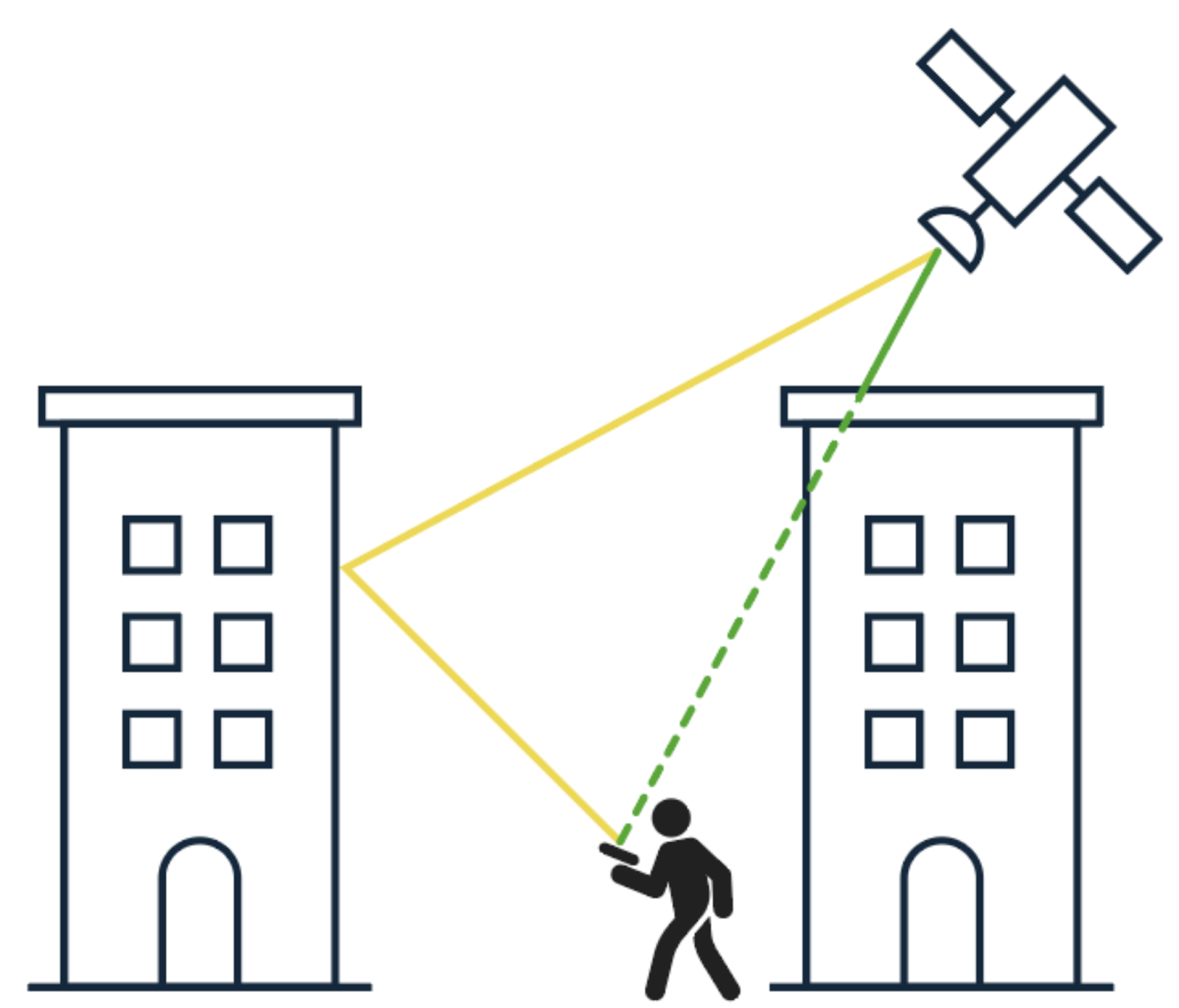
Signal blockage: Ideally, you want to have an unobstructed view so that the receiver can “see” a satellite in a clear line of sight. This is not always possible, for example in cities with high buildings, mountainous areas, or beneath foliage. These obstructions can lead to signal blockage so that a time or position signal reception becomes impossible.
Atmospheric conditions: The satellite signal travels through different layers of the Earth. Ionospheric delay is a change of the transmission time as a result of electronically charged particles in the ionosphere, which is the outermost layer of the atmosphere above the Earth. This can lead to a significant position error. Similarly, variations in the troposphere due to atmospheric pressure can cause tropospheric delays in rovers and receivers on Earth.
Errors caused by reflections (multipath): Satellite signal reception through several paths rather than from a direct line of sight. When part of the signal reaches the receiver after bouncing off a surface or object. Learn more about multipath.
The diagram above shows the line of sight (LOS) being obstructed by a high-rise building.
Signal blockage: Ideally, you want to have an unobstructed view so that the receiver can “see” a satellite in a clear line of sight. This is not always possible, for example in cities with high buildings, mountainous areas, or beneath foliage. These obstructions can lead to signal blockage so that a time or position signal reception becomes impossible.
Atmospheric conditions: The satellite signal travels through different layers of the Earth. Ionospheric delay is a change of the transmission time as a result of electronically charged particles in the ionosphere, which is the outermost layer of the atmosphere above the Earth. This can lead to a significant position error. Similarly, variations in the troposphere due to atmospheric pressure can cause tropospheric delays in rovers and receivers on Earth.
Errors caused by reflections (multipath): Satellite signal reception through several paths rather than from a direct line of sight. When part of the signal reaches the receiver after bouncing off a surface or object. Learn more about multipath.
The diagram above shows the line of sight (LOS) being obstructed by a high-rise building.
Satellite and receiver clock errors: small timing errors in satellite clocks may lead to inaccuracies in the transmitted time signal, impacting the calculations of the distance to the receiver. Receiver clocks are less accurate than those in satellites and can introduce errors in the calculated position.
Satellite position drift: errors in satellite orbit position, which lead to position calculation on Earth when used by GNSS receivers.
Receiver noise: the position error caused by the receiver or software. All GNSS receivers are subject to other radio waves and electrical interference, impacting the GNSS signal. In general, this error is smaller for more expensive GNSS equipment.
Jamming: an intentional radio interference with GNSS signals renders the service ineffective in areas where this happens.
Spoofing: this happens when sending a false GNSS signal to a receiver, leading to incorrect position information, clock offset, or both. Read about what happens during a spoofing attack.
Satellite and receiver clock errors: small timing errors in satellite clocks may lead to inaccuracies in the transmitted time signal, impacting the calculations of the distance to the receiver. Receiver clocks are less accurate than those in satellites and can introduce errors in the calculated position.
Satellite position drift: errors in satellite orbit position, which lead to position calculation on Earth when used by GNSS receivers.
Receiver noise: the position error caused by the receiver or software. All GNSS receivers are subject to other radio waves and electrical interference, impacting the GNSS signal. In general, this error is smaller for more expensive GNSS equipment.
Jamming: an intentional radio interference with GNSS signals renders the service ineffective in areas where this happens.
Spoofing: this happens when sending a false GNSS signal to a receiver, leading to incorrect position information, clock offset, or both. Read about what happens during a spoofing attack.
Which methods help to improve location and timing accuracy?
The following methods help to improve GNSS accuracy:
- Code phase:
Differential GNSS (DGNSS): Leveraging a local GNSS base station at a known location to calculate corrections to the Pseudoranges it has calculated. The corrections are typically sent and received by a rover (a mobile GPS receiver) to improve its own position calculations. Variations on DGNSS include SBAS (Satellite Based Augmentation System), where a satellite can transmit corrections for a specific area, and GBAS (Ground-Based Augmentation System), where these are provided by the base station itself, typically over a radio link.
- Carrier phase:
Real-Time Kinematic (RTK): Similar to DGNSS, RTK leverages a stationary base station at a precisely known point to transmit GNSS corrections to rovers, but uses a different measurement type: RTK uses carrier-phase measurements, which result in higher positional accuracies than DGNSS.
Precise Point Positioning (PPP): PPP enables single, standalone GNSS receivers to provide high accuracy (decimetre-level) positioning. It relies upon a global network of reference stations from which correction data are generated and subsequently transmitted to individual GNSS receivers via a data communications link (e.g. via satellite or the internet). Each receiver applies these corrections to enhance its position accuracy. Typical GNSS error sources accounted for in the correction data include atmospheric delays and precise satellite orbit information.
Differential GNSS (DGNSS): Leveraging a local GNSS base station at a known location to calculate corrections to the Pseudoranges it has calculated. The corrections are typically sent and received by a rover (a mobile GPS receiver) to improve its own position calculations. Variations on DGNSS include SBAS (Satellite Based Augmentation System), where a satellite can transmit corrections for a specific area, and GBAS (Ground-Based Augmentation System), where these are provided by the base station itself, typically over a radio link.
Differential GNSS (DGNSS): Leveraging a local GNSS base station at a known location to calculate corrections to the Pseudoranges it has calculated. The corrections are typically sent and received by a rover (a mobile GPS receiver) to improve its own position calculations. Variations on DGNSS include SBAS (Satellite Based Augmentation System), where a satellite can transmit corrections for a specific area, and GBAS (Ground-Based Augmentation System), where these are provided by the base station itself, typically over a radio link.
Real-Time Kinematic (RTK): Similar to DGNSS, RTK leverages a stationary base station at a precisely known point to transmit GNSS corrections to rovers, but uses a different measurement type: RTK uses carrier-phase measurements, which result in higher positional accuracies than DGNSS.
Precise Point Positioning (PPP): PPP enables single, standalone GNSS receivers to provide high accuracy (decimetre-level) positioning. It relies upon a global network of reference stations from which correction data are generated and subsequently transmitted to individual GNSS receivers via a data communications link (e.g. via satellite or the internet). Each receiver applies these corrections to enhance its position accuracy. Typical GNSS error sources accounted for in the correction data include atmospheric delays and precise satellite orbit information.
Real-Time Kinematic (RTK): Similar to DGNSS, RTK leverages a stationary base station at a precisely known point to transmit GNSS corrections to rovers, but uses a different measurement type: RTK uses carrier-phase measurements, which result in higher positional accuracies than DGNSS.
Precise Point Positioning (PPP): PPP enables single, standalone GNSS receivers to provide high accuracy (decimetre-level) positioning. It relies upon a global network of reference stations from which correction data are generated and subsequently transmitted to individual GNSS receivers via a data communications link (e.g. via satellite or the internet). Each receiver applies these corrections to enhance its position accuracy. Typical GNSS error sources accounted for in the correction data include atmospheric delays and precise satellite orbit information.
Sensor fusion / dead reckoning:
Sensor fusion / dead reckoning:
Sensor fusion involves fusion the GNSS data with data from other sensors, such as IMUs (Inertial Measurement Units) and wheel tick sensors, to enhance the accuracy and reliability of positioning for both vehicles and pedestrians. By integrating data from different sources, sensor fusion compensates for the limitations of individual sensors. For example, GNSS signals may be blocked or degraded in urban environments, tunnels, or dense forests, but IMUs and other sensors can continue to provide accurate positional data through dead reckoning. As inertial sensors are prone to drift errors, GNSS can help calibrate them with that initial starting position. Sensor fusion allows for continuous, accurate location tracking by blending multiple inputs, which is essential for applications such as navigation, real-time tracking, and safety.
Common GNSS applications
GNSS is used in all transport modalities, including aeroplanes, cars, and boats. Other applications requiring high-precision location data are mapping/surveying and precision agriculture.
Car navigation: The first generation of GPS-enabled navigation systems gave driving directions to a car driver. Today, GNSS constellations provide absolute positioning to the next generation of cars, such as automated lane selection for ADAS (Advanced Driver-Assistance System) and other automated driving options. Learn more about the role of GNSS positioning in ADAS.
Smartphones: GNSS is widely integrated into smartphones, enabling accurate location-based services. In smartphones, GNSS is primarily used for navigation, mapping, geotagging, fitness tracking, and real-time location sharing through apps like Google Maps or Uber.
Wearables: Wearables, such as smartwatches and fitness trackers, use GNSS to enhance health and fitness monitoring by tracking outdoor activities like running, cycling, and hiking, providing data on distance, speed, and routes.
Emergency services: GNSS also supports emergency services, enabling accurate location pinpointing to ensure timely delivery of treatment.
Mapping and surveying: Providing centimetre-accuracy level positioning information, mapping and surveying uses GNSS correction data to improve the positional accuracy of field measurements to meet industry standards.
Precision agriculture: This form of agriculture intends to improve crop yields and assist management decisions with high-technology sensor and analysis tools. GNSS-based applications use high-precision location data to support many agricultural tasks, including farm planning, and reduce cost and environmental impact of pesticides, fertilisers, and herbicides.
Maritime: GNSS is used in marine navigation, harbour entrances, and positioning of crews and vessels.
Car navigation: The first generation of GPS-enabled navigation systems gave driving directions to a car driver. Today, GNSS constellations provide absolute positioning to the next generation of cars, such as automated lane selection for ADAS (Advanced Driver-Assistance System) and other automated driving options. Learn more about the role of GNSS positioning in ADAS.
Smartphones: GNSS is widely integrated into smartphones, enabling accurate location-based services. In smartphones, GNSS is primarily used for navigation, mapping, geotagging, fitness tracking, and real-time location sharing through apps like Google Maps or Uber.
Wearables: Wearables, such as smartwatches and fitness trackers, use GNSS to enhance health and fitness monitoring by tracking outdoor activities like running, cycling, and hiking, providing data on distance, speed, and routes.
Emergency services: GNSS also supports emergency services, enabling accurate location pinpointing to ensure timely delivery of treatment.
Mapping and surveying: Providing centimetre-accuracy level positioning information, mapping and surveying uses GNSS correction data to improve the positional accuracy of field measurements to meet industry standards.
Precision agriculture: This form of agriculture intends to improve crop yields and assist management decisions with high-technology sensor and analysis tools. GNSS-based applications use high-precision location data to support many agricultural tasks, including farm planning, and reduce cost and environmental impact of pesticides, fertilisers, and herbicides.
Maritime: GNSS is used in marine navigation, harbour entrances, and positioning of crews and vessels.
Emerging trends in GNSS technology
These are some of the emerging trends in GNSS technology:
Multi-frequency receivers
Any GNSS receiver that can access more signals can collect more information resulting in a better position calculation. Single-frequency receivers are typically limited to the L1/E1 signals, while multi-frequency receivers can reap the benefits of more GNSS bands like L5/E5 and access the associated benefits. The Apple Watch Ultra for example, uses dual-band GPS, which allows it to access both the L1 and L5 frequency bands, providing improved accuracy and reliability in positioning. However, the majority of consumer devices still primarily use single-band GPS, which operates only on the L1 band. It is expected that dual-band GPS technology will become more widely available in the coming years as manufacturers increasingly recognise the benefits of enhanced accuracy and resilience against interference that dual-band systems offer. This trend may lead to broader adoption across various devices, including smartphones, wearables, and other GPS-enabled technology.
5G telecommunications
5G is set to enhance GNSS positioning by providing more precise timing and location data which can be used by GNSS receivers to improve accuracy. The high-speed, low-latency nature of 5G allows for quick transmission of correction data and augmentation information, improving real-time positioning. In areas with weak GNSS signals, 5G enables network-based positioning alternatives. These advancements are particularly crucial for applications like autonomous vehicles, precision agriculture, and augmented reality, where high-precision positioning is essential.
Cost
Cost is a key factor shaping trends in GNSS technology, with a focus on getting the best performance without overspending. Rather than relying on expensive hardware upgrades, modern approaches favour software improvements to boost accuracy and address issues like signal blockages or reflections. Antennas play a crucial role and can be a cost-effective way to enhance signal reception, particularly in challenging environments
Future developments in GNSS accuracy
Updating and modernising existing fleets: New satellites are continuously launched by all major GNSS constellations, offering improved signal resilience such as more robust anti-jamming technology and enhanced resistance to spoofing. Making GNSS signals more secure is another focus area for future GNSS developments.
High-accuracy positioning data for autonomous systems: Advancements in GNSS technology are key to the widespread adoption of autonomous systems including self-driving cars, robotics, and drones. These all need the centimetre-level accuracy positioning that GNSS systems provide.
Updating and modernising existing fleets: New satellites are continuously launched by all major GNSS constellations, offering improved signal resilience such as more robust anti-jamming technology and enhanced resistance to spoofing. Making GNSS signals more secure is another focus area for future GNSS developments.
High-accuracy positioning data for autonomous systems: Advancements in GNSS technology are key to the widespread adoption of autonomous systems including self-driving cars, robotics, and drones. These all need the centimetre-level accuracy positioning that GNSS systems provide.
LEO GNSS: GNSS provided by LEO (Low Earth Orbit) satellites is an emerging technology in early deployment stages, with companies actively researching and testing initial constellations. The benefits include improved accuracy, faster positioning, and better performance in challenging environments due to the satellites’ proximity to Earth. While promising, the technology faces challenges in implementation and integration with existing systems, and is still in development.
LEO GNSS: GNSS provided by LEO (Low Earth Orbit) satellites is an emerging technology in early deployment stages, with companies actively researching and testing initial constellations. The benefits include improved accuracy, faster positioning, and better performance in challenging environments due to the satellites’ proximity to Earth. While promising, the technology faces challenges in implementation and integration with existing systems, and is still in development.
GPS L6 band: A new band, currently in the planning stage, which will build on the improvements of the L5 band to improve accuracy and resilience for high precision applications like agriculture and autonomous driving.
GPS L6 band: A new band, currently in the planning stage, which will build on the improvements of the L5 band to improve accuracy and resilience for high precision applications like agriculture and autonomous driving.
Focal Point Positioning’s S-GNSSⓇ Auto is a positioning software powered by Supercorrelation™, a cutting-edge technology that addresses the limitations of GNSS in environments where signal degradation occurs due to reflections and multipath errors. By enhancing the signal processing capabilities of GNSS receivers, Supercorrelation offers more accurate and reliable positioning, especially in urban areas. Learn more about Supercorrelation here.
Share this post

Ramya Sriram leads marketing at FocalPoint, a UK-based company that provides GPS-enhancing software for automotive, wearables and smartphones.
Related post
V2X for safety: Vehicle-to-everything technology for emergency vehicle management in smart cities
We’re well on the way towards living in a world of smart cities, where connectivity and technology converge to enhance urban living. With this enhancement comes one of the most promising innovations: Vehicle-to-Everything (V2X) communication.